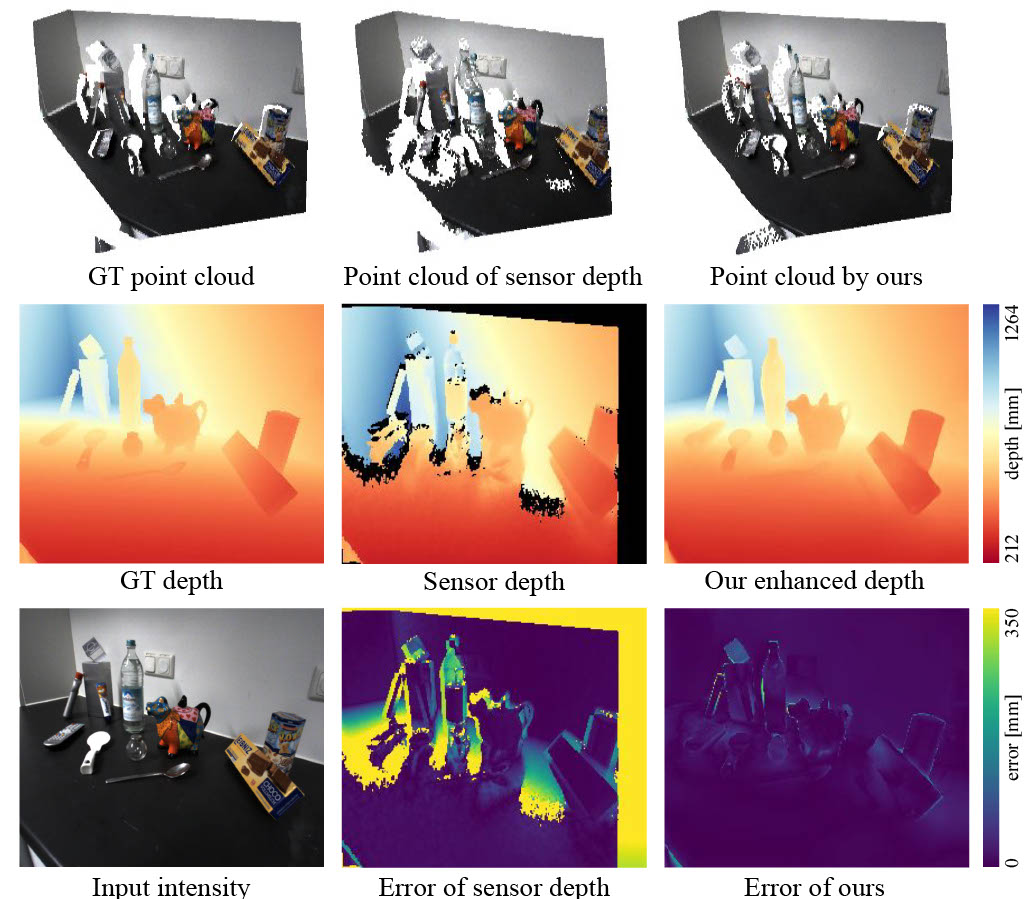
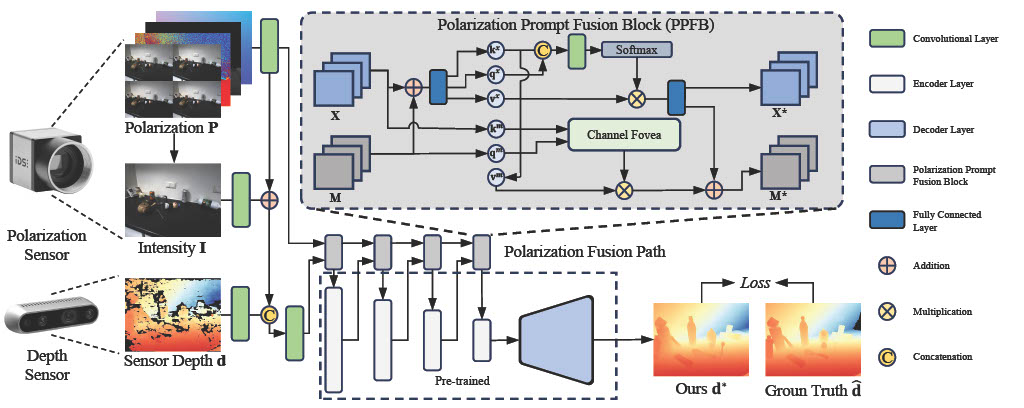
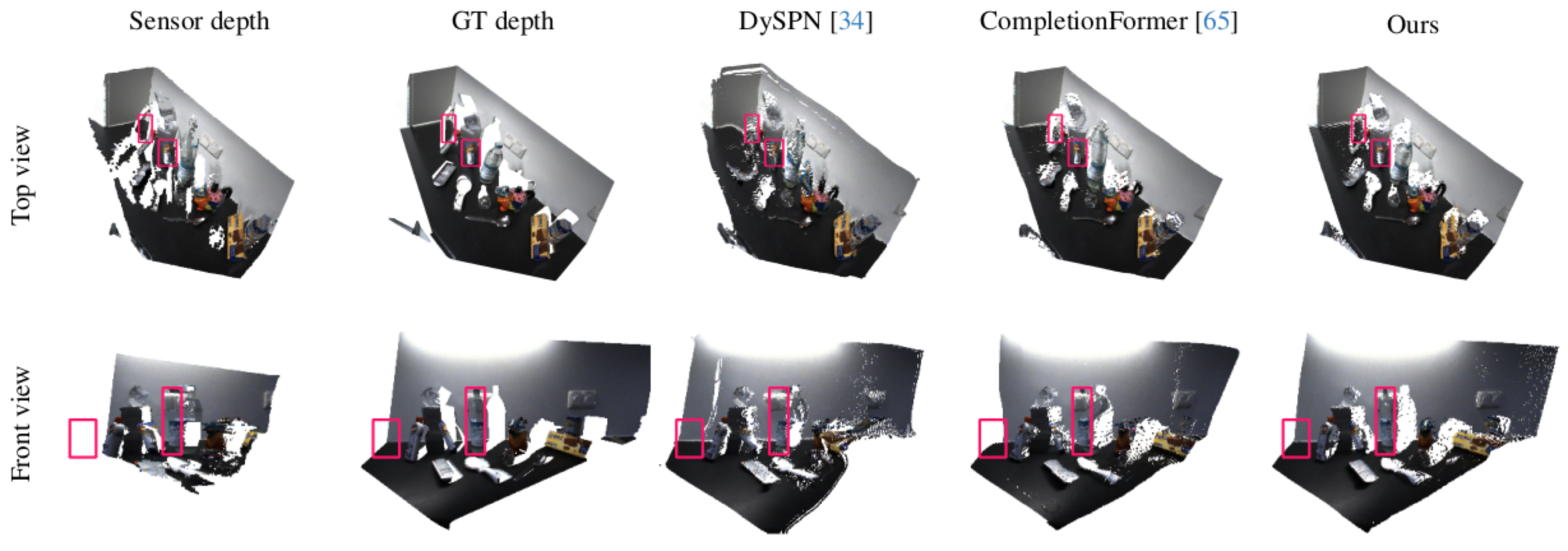
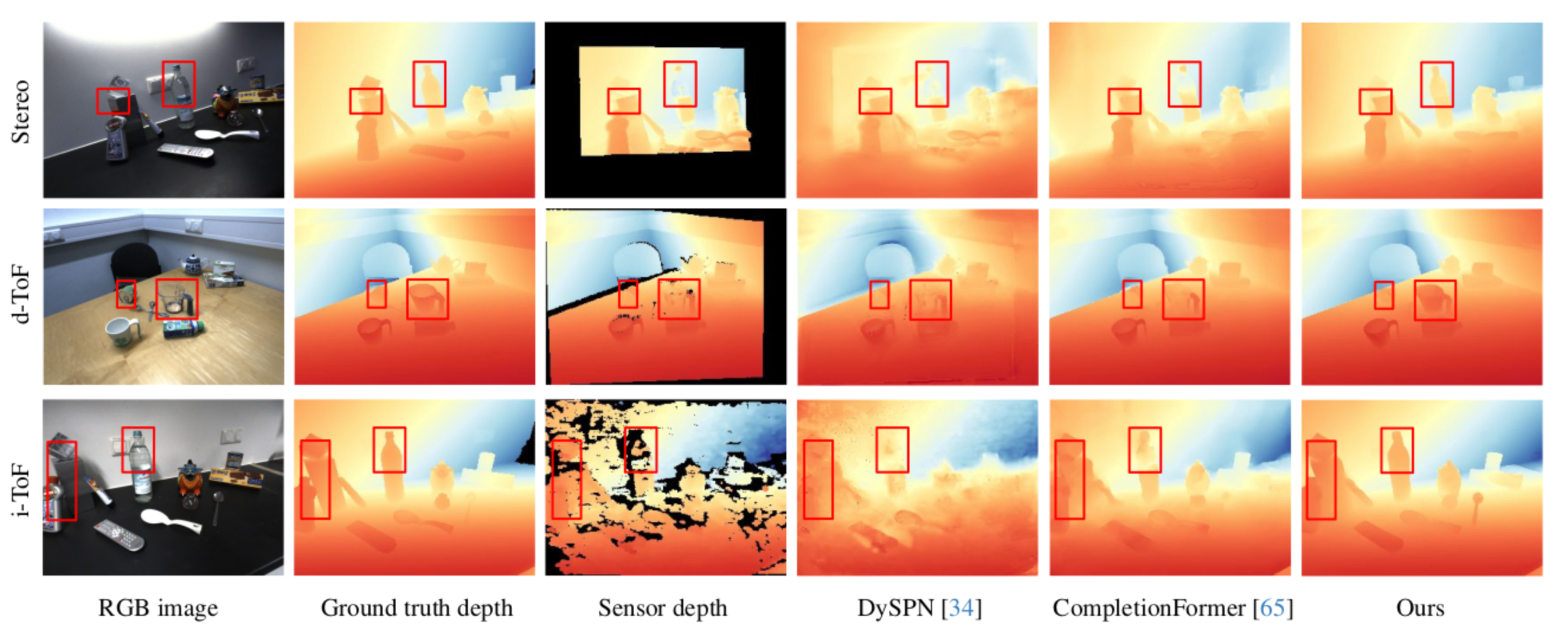
Existing depth sensors are imperfect and may provide inaccurate depth values in challenging scenarios, such as in the presence of transparent or reflective objects. In this work, we present a general framework that leverages polarization imaging to improve inaccurate depth measurements from various depth sensors. Previous polarization-based depth enhancement methods focus on utilizing pure physics-based formulas for a single sensor. In contrast, our method first adopts a learning-based strategy where a neural network is trained to estimate a dense and complete depth map from polarization data and a sensor depth map from different sensors. To further improve the performance, we propose a Polarization Prompt Fusion Tuning (PPFT) strategy to effectively utilize RGB-based models pre-trained on large-scale datasets, as the size of the polarization dataset is limited to train a strong model from scratch. We conducted extensive experiments on a public dataset, and the results demonstrate that the proposed method performs favorably compared to existing depth enhancement baselines.
@misc{ikemura2024robust,
title={Robust Depth Enhancement via Polarization Prompt Fusion Tuning},
author={Kei Ikemura and Yiming Huang and Felix Heide and Zhaoxiang Zhang and Qifeng Chen and Chenyang Lei},
year={2024},
eprint={2404.04318},
archivePrefix={arXiv},
primaryClass={cs.CV}
}We sincerely thank CompletionfFormer for their opensource code. We also thanks HAMMER for the opensource dataset.