LiDAR-EVS: Enhance Extrapolated View Synthesis for 3D Gaussian Splatting with Pseudo-LiDAR Supervision
Extrapolated Right Shifted 3m NVS CD ↓48.6% vs. SplatAD
Extrapolated Left Shifted 3m NVS CD ↓47.2% vs. SplatAD
Interpolated NVS (Original Traj.) Comparable to origin
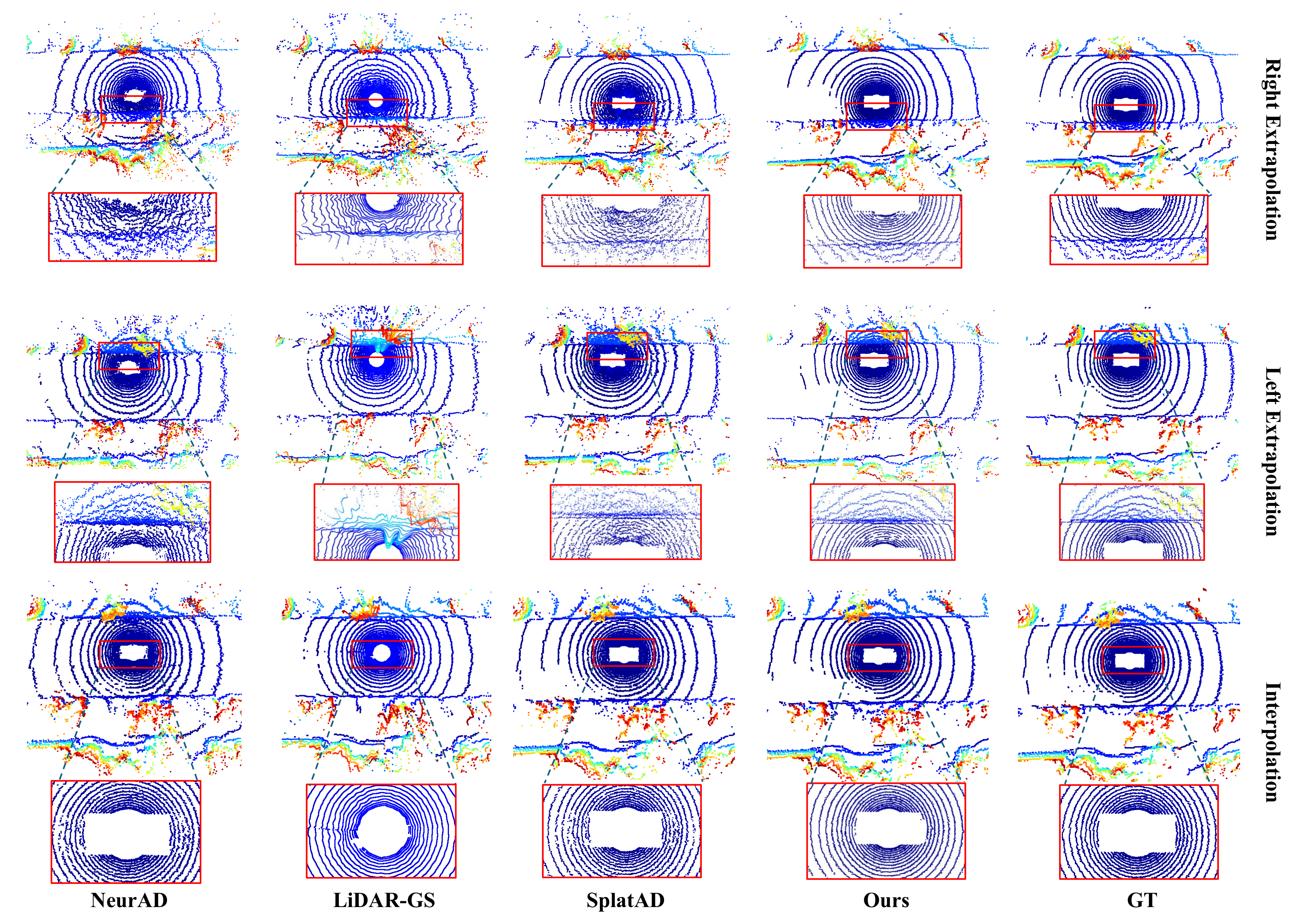
Each video visualizes bird's-eye-view LiDAR predictions from LiDARGS, NeurAD, SplatAD, and LiDAR-EVS. Our method preserves cleaner geometry and more complete structures under 3m left/right extrapolated trajectories, while maintaining performance comparable to the original trajectory for interpolated-view rendering.
Abstract
3D Gaussian Splatting (3DGS) has emerged as a powerful technique for real-time LiDAR and camera synthesis in autonomous driving simulation. However, simulating LiDAR with 3DGS remains challenging for extrapolated views beyond the training trajectory, as existing methods are typically trained on single-traversal sensor scans, suffer from severe overfitting and poor generalization to novel ego-vehicle paths. To enable reliable simulation of LiDAR along unseen driving trajectories without external multi-pass data, we present LiDAR-EVS, a lightweight framework for robust extrapolated-view LiDAR simulation in autonomous driving. Designed to be plug-and-play, LiDAR-EVS readily extends to diverse LiDAR sensors and neural rendering baselines with minimal modification. Our framework comprises two key components: (1) pseudo extrapolated-view point cloud supervision with multi-frame LiDAR fusion, view transformation, occlusion curling, and intensity adjustment; (2) spatially-constrained dropout regularization that promotes robustness to diverse trajectory variations encountered in real-world driving. Extensive experiments demonstrate that LiDAR-EVS achieves SOTA performance on extrapolated-view LiDAR synthesis across three datasets, making it a promising tool for data-driven simulation, closed-loop evaluation, and synthetic data generation in autonomous driving systems.
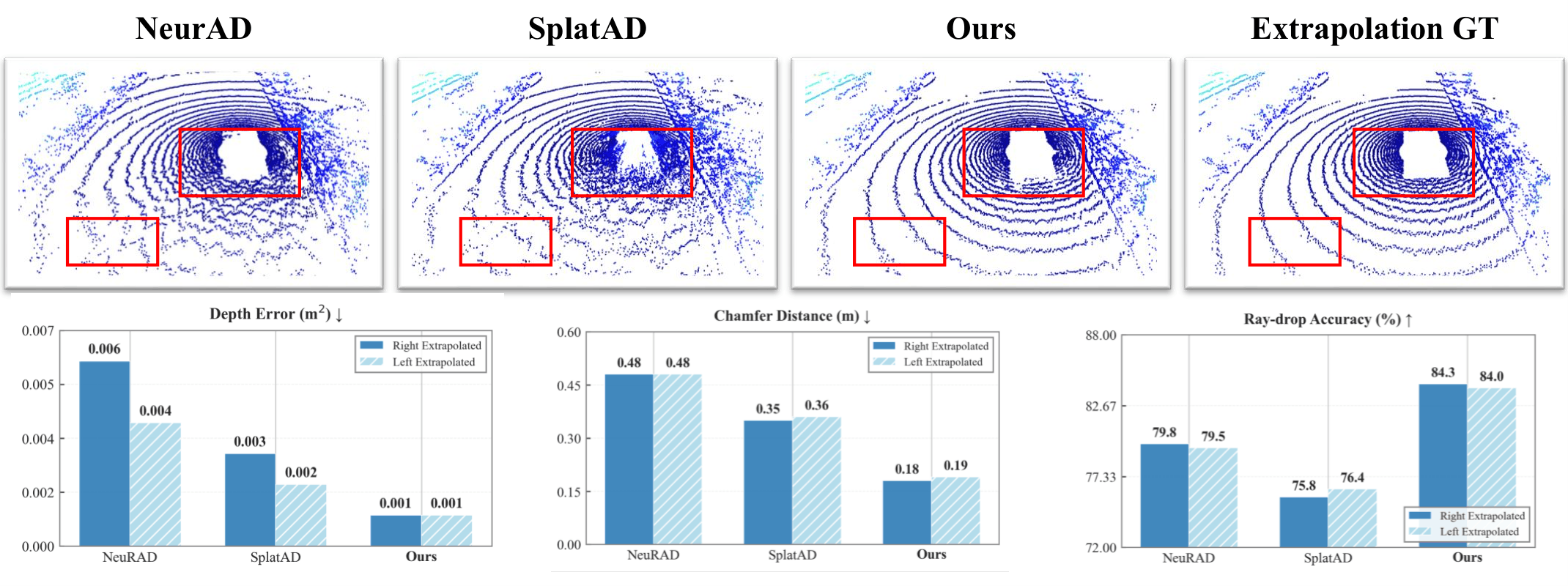
LiDAR-EVS improves extrapolated-view LiDAR synthesis beyond the training trajectory.
Methodology
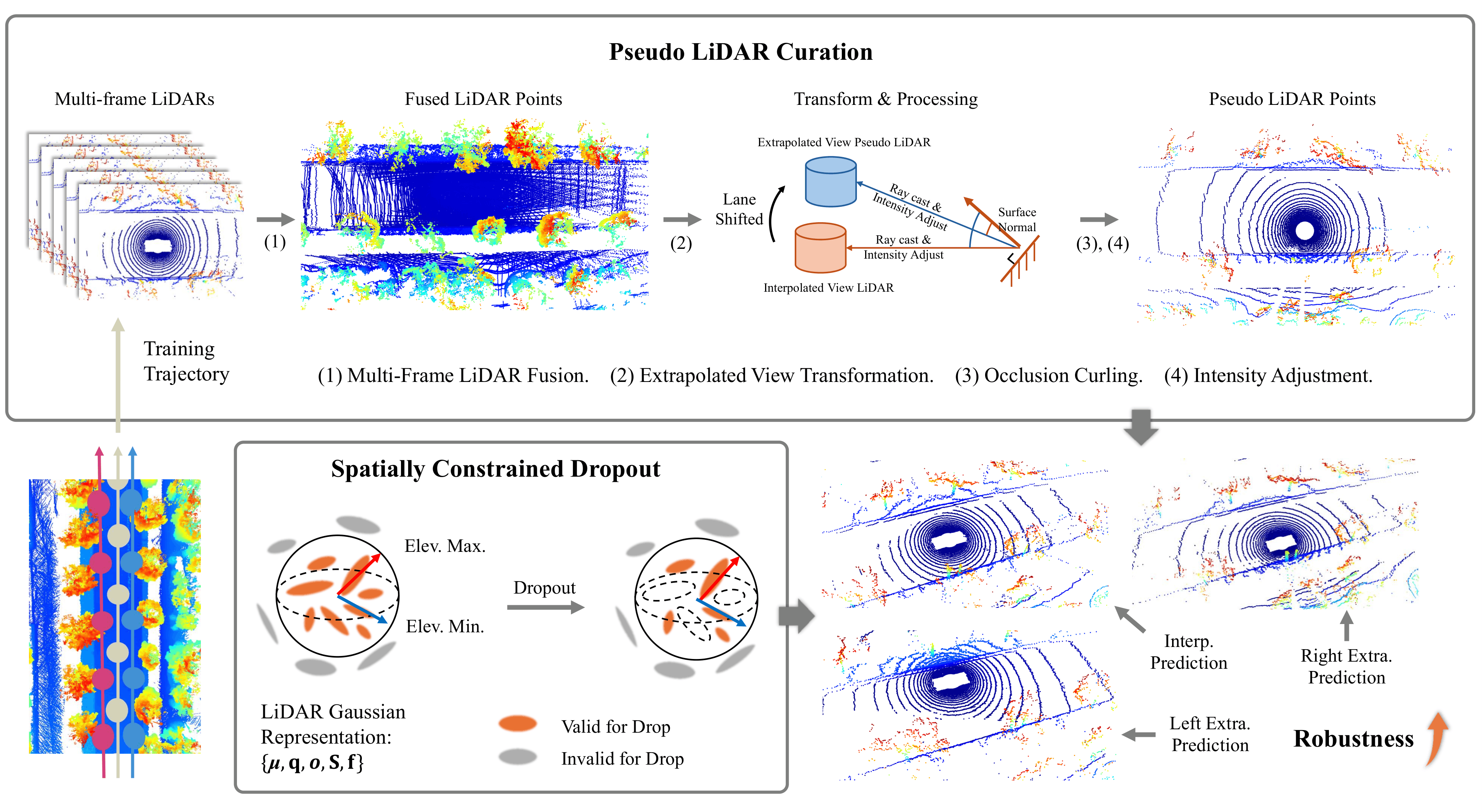
Our framework consists of two key modules: Pseudo LiDAR Curation and Spatially Constrained Dropout. Pseudo LiDAR curation include the following steps: (1) Multi-frame fusion, (2) Extrapolated view transformation, (3) Occlusion curling, (4) Intensity adjustment. With the proposed framework, we can optimize the Gaussian scene representation to achieve robust LiDAR synthesis for both interpolated and extrapolated view rendering.
Experiment Results
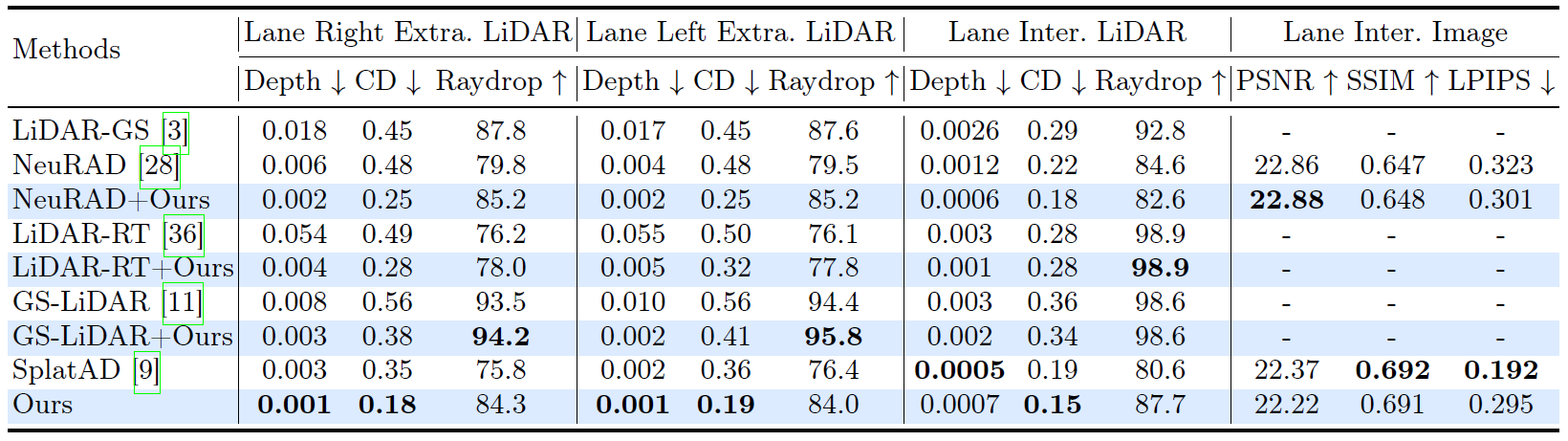
Para-Lane Quantitative Results
Para-Lane Qualitative Results
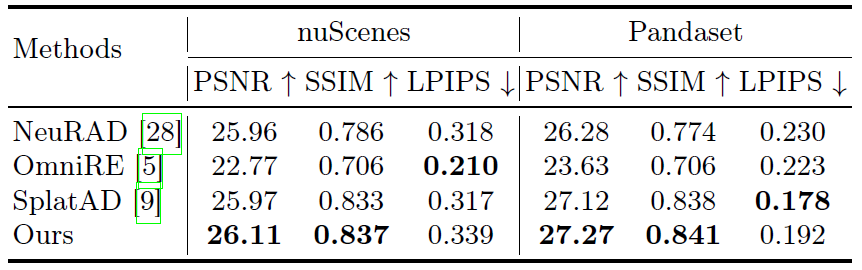
nuScenes Quantitative Results

PandaSet Quantitative Results

nuScenes Qualitative Results
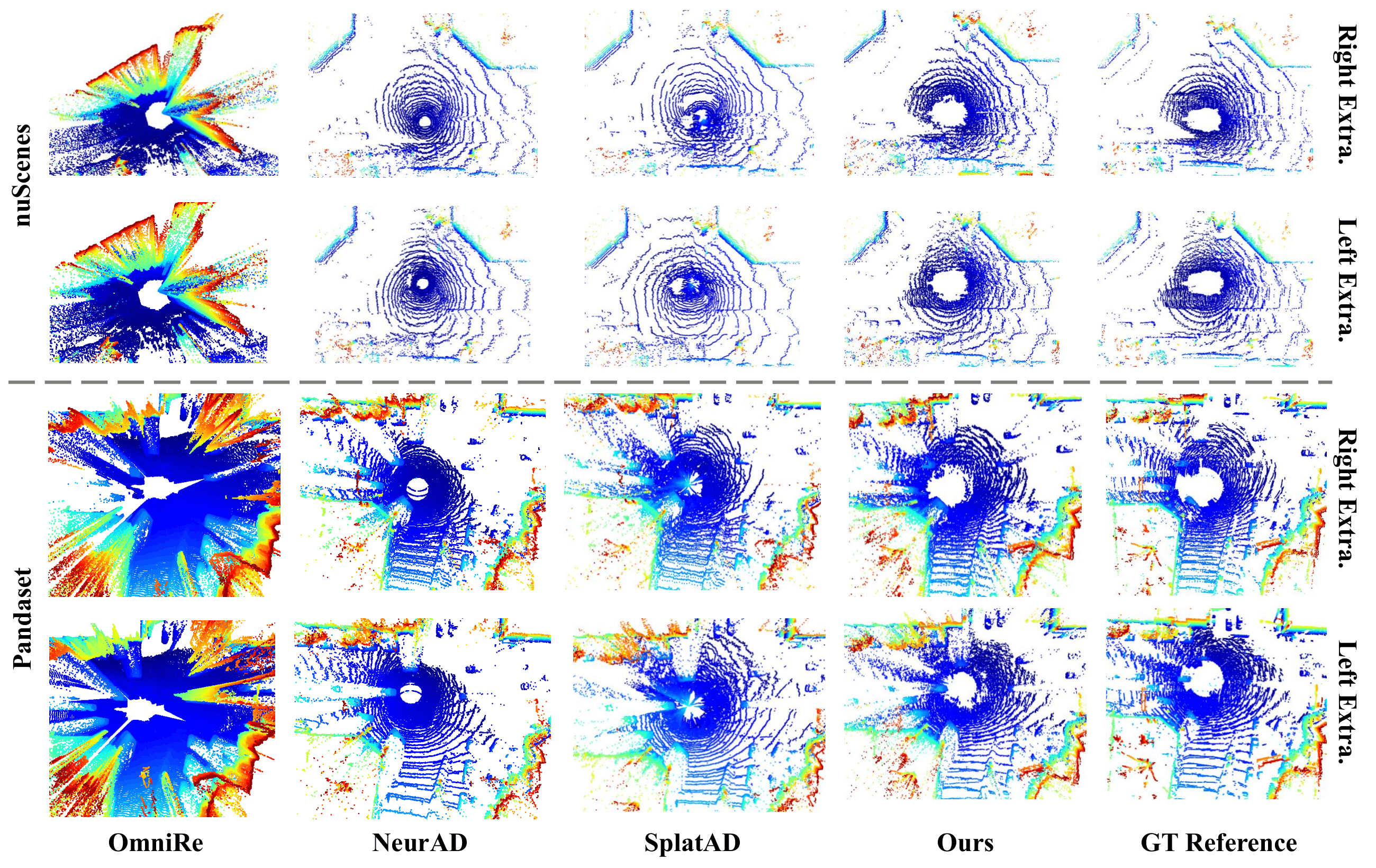
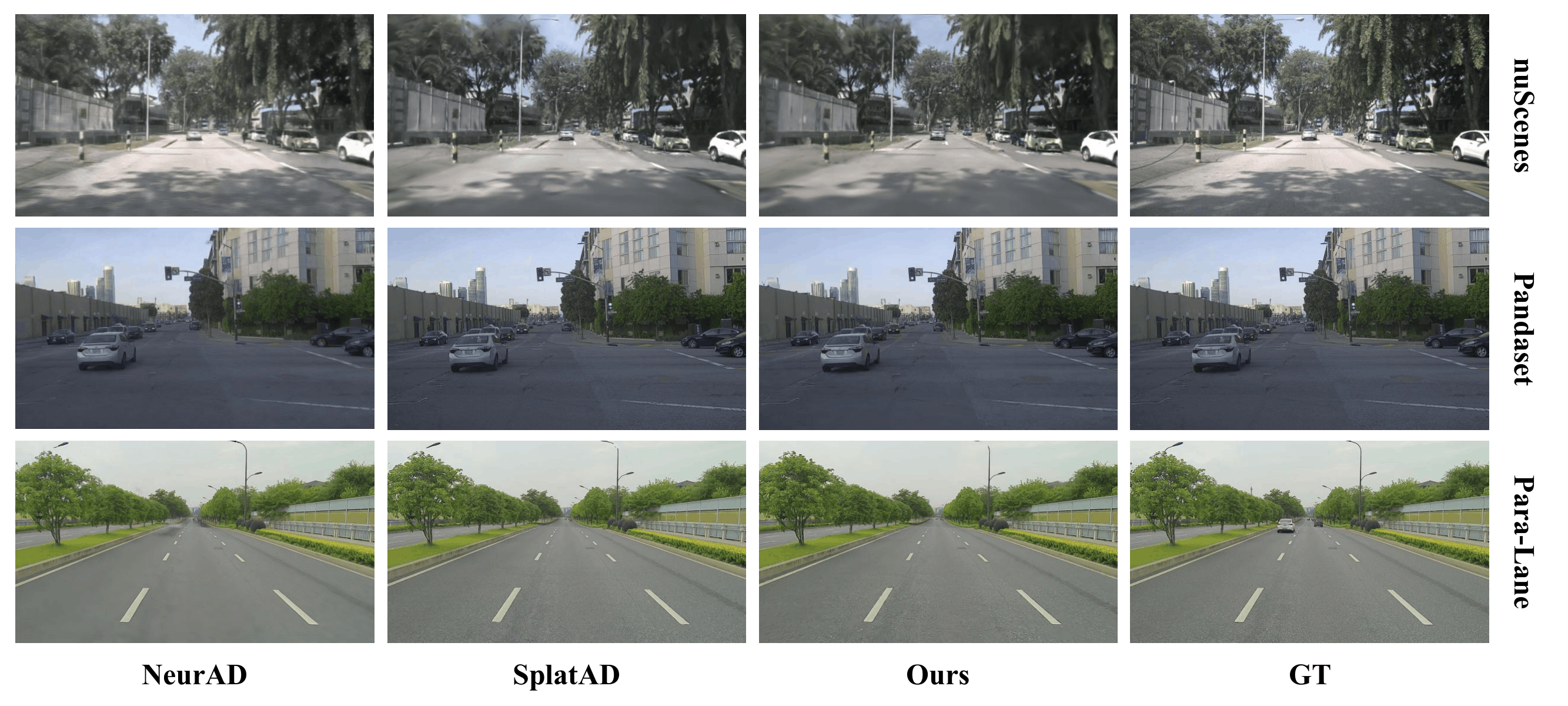
Image Rendering Results
RGB Rendering Qualitative Results
BibTeX
@misc{huang2026lidarevsenhanceextrapolatedview,
title={LiDAR-EVS: Enhance Extrapolated View Synthesis for 3D Gaussian Splatting with Pseudo-LiDAR Supervision},
author={Yiming Huang and Xin Kang and Sipeng Zhang and Hongliang Ren and Weihua Zhang and Junjie Lai},
year={2026},
eprint={2603.14763},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2603.14763},
}